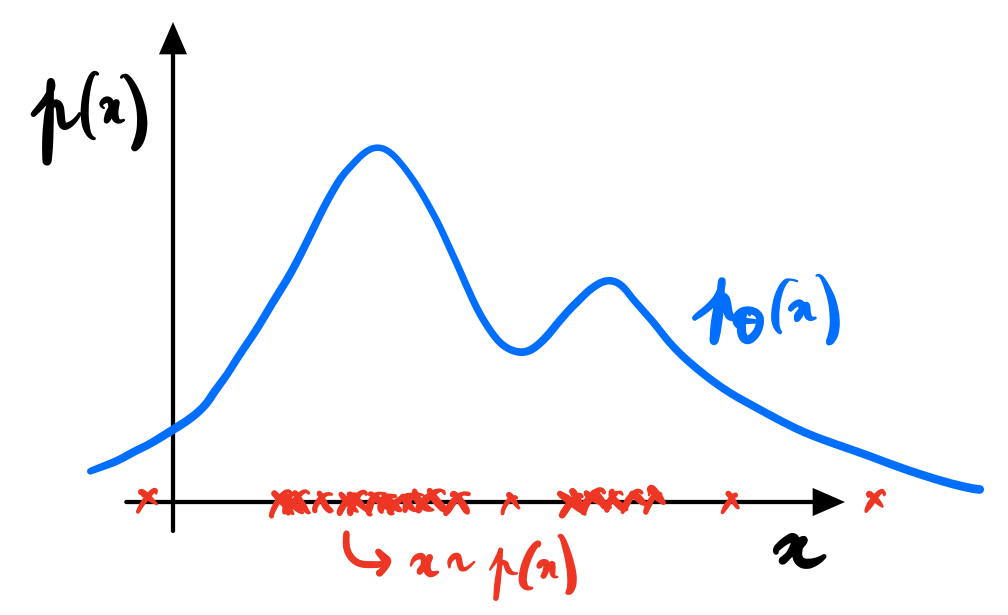
Generative models
What makes a good generative model (Prince 2023)?
Generative models based on latent variables should have the following properties:
- Efficient sampling: Generating samples from the model should be computation- ally inexpensive and take advantage of the parallelism of modern hardware.
- High-quality sampling: The samples should be indistinguishable from the real data with which the model was trained.
- Coverage: Samples should represent the entire training distribution. It is insufficient to generate samples that all look like a subset of the training examples.
- Well-behaved latent space: Every latent variable \(z\) corresponds to a plausible data example \(x\). Smooth changes in \(z\) correspond to smooth changes in \(x\).
- Disentangled latent space: Manipulating each dimension of \(z\) should correspond to changing an interpretable property of the data. For example, in a model of language, it might change the topic, tense, or verbosity.
- Efficient likelihood computation: If the model is probabilistic, we would like to be able to calculate the probability of new examples
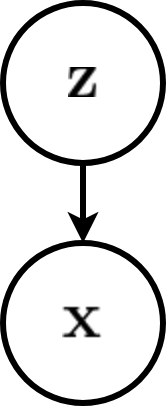
Latent variable model
Consider for now a prescribed latent variable model that relates a set of observable variables \(\mathbf{x} \in \mathcal{X}\) to a set of unobserved variables \(\mathbf{z} \in \mathcal{Z}\).
The probabilistic model defines a joint probability distribution \(p_\theta(\mathbf{x}, \mathbf{z})\), which decomposes as \[p_\theta(\mathbf{x}, \mathbf{z}) = p_\theta(\mathbf{x}|\mathbf{z}) p(\mathbf{z}).\]
If we interpret \(\mathbf{z}\) as causal factors for the high-dimension representations \(\mathbf{x}\), then sampling from \(p_\theta(\mathbf{x}|\mathbf{z})\) can be interpreted as a stochastic generating process from \(\mathcal{Z}\) to \(\mathcal{X}\).
Hot to fit?
\[\begin{aligned}
\theta^{*} &= \arg \max_\theta p_\theta(\mathbf{x}) \\\\
&= \arg \max_\theta \int p_\theta(\mathbf{x}|\mathbf{z}) p(\mathbf{z}) d\mathbf{z}\\\\
&= \arg \max_\theta \mathbb{E}_{p(\mathbf{z})}\left[ p_\theta(\mathbf{x}|\mathbf{z}) \right] d\mathbf{z}\\\\
&\approx \arg \max_\theta \frac{1}{N} \sum_{i=1}^N p_\theta(\mathbf{x}|\mathbf{z}_i)
\end{aligned}\]
The curse of dimensionality will lead to poor estimates of the expectation.
We will directly learn a stochastic generating process \(p_\theta(\mathbf{x}|\mathbf{z})\) with a neural network.
We will also amortize the inference process by learning a second neural network \(q_\phi(\mathbf{z}|\mathbf{x})\) approximating the posterior, conditionally on the observed data \(\mathbf{x}\).
A variational auto-encoder is a deep latent variable model where:
The prior \(p(\mathbf{z})\) is prescribed, and usually chosen to be Gaussian.
The density \(p_\theta(\mathbf{x}|\mathbf{z})\) is parameterized with a generative network \(\text{NN}_\theta\) (or decoder) that takes as input \(\mathbf{z}\) and outputs parameters to the data distribution. E.g., \[\begin{aligned}
\mu, \sigma^2 &= \text{NN}_\theta(\mathbf{z}) \\\\
p_\theta(\mathbf{x}|\mathbf{z}) &= \mathcal{N}(\mathbf{x}; \mu, \sigma^2\mathbf{I})
\end{aligned}\]
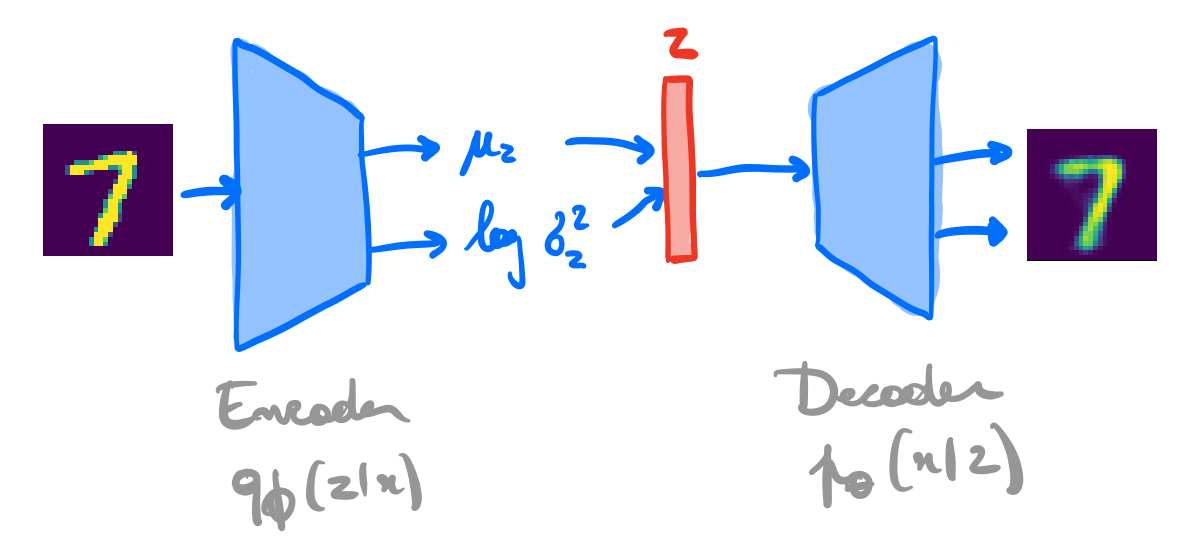
The approximate posterior \(q_\phi(\mathbf{z}|\mathbf{x})\) is parameterized with an inference network \(\text{NN}_\phi\) (or encoder) that takes as input \(\mathbf{x}\) and outputs parameters to the approximate posterior. E.g., \[\begin{aligned}
\mu, \sigma^2 &= \text{NN}_\phi(\mathbf{x}) \\\\
q_\phi(\mathbf{z}|\mathbf{x}) &= \mathcal{N}(\mathbf{z}; \mu, \sigma^2\mathbf{I})
\end{aligned}\]
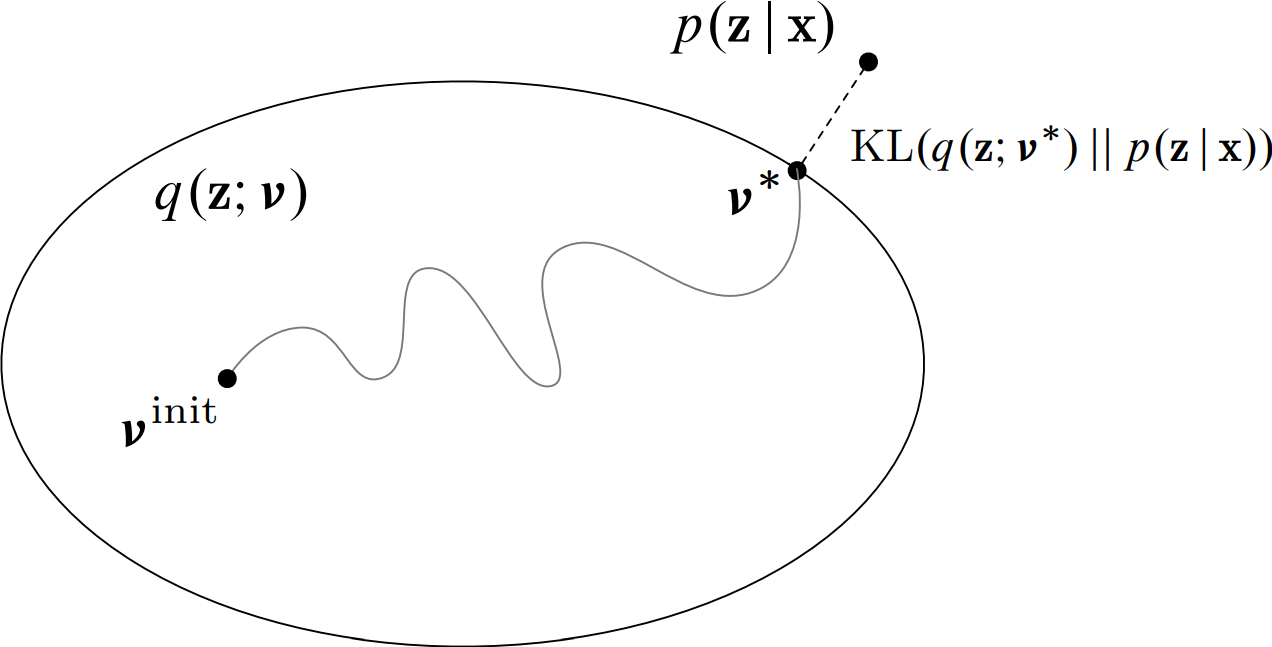
Variational auto-encoders
![]()
We can use variational inference to jointly optimize the generative and the inference networks parameters \(\theta\) and \(\phi\):
\[\begin{aligned}
\theta^{*}, \phi^{*} &= \arg \max_{\theta,\phi} \mathbb{E}_{p(\mathbf{x})} \left[ \text{ELBO}(\mathbf{x};\theta,\phi) \right] \\\\
&= \arg \max_{\theta,\phi} \mathbb{E}_{p(\mathbf{x})}\left[ \mathbb{E}_{q_\phi(\mathbf{z}|\mathbf{x})} [ \log \frac{p_\theta(\mathbf{x}|\mathbf{z}) p(\mathbf{z})}{q_\phi(\mathbf{z}|\mathbf{x})} ] \right] \\\\
&= \arg \max_{\theta,\phi} \mathbb{E}_{p(\mathbf{x})}\left[ \mathbb{E}_{q_\phi(\mathbf{z}|\mathbf{x})}\left[ \log p_\theta(\mathbf{x}|\mathbf{z})\right] - \text{KL}(q_\phi(\mathbf{z}|\mathbf{x}) || p(\mathbf{z})) \right].
\end{aligned}\]
- Given some generative network \(\theta\), we want to put the mass of the latent variables, by adjusting \(\phi\), such that they explain the observed data, while remaining close to the prior.
- Given some inference network \(\phi\), we want to put the mass of the observed variables, by adjusting \(\theta\), such that they are well explained by the latent variables.
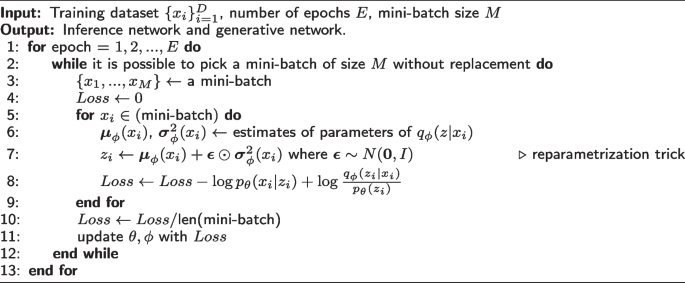
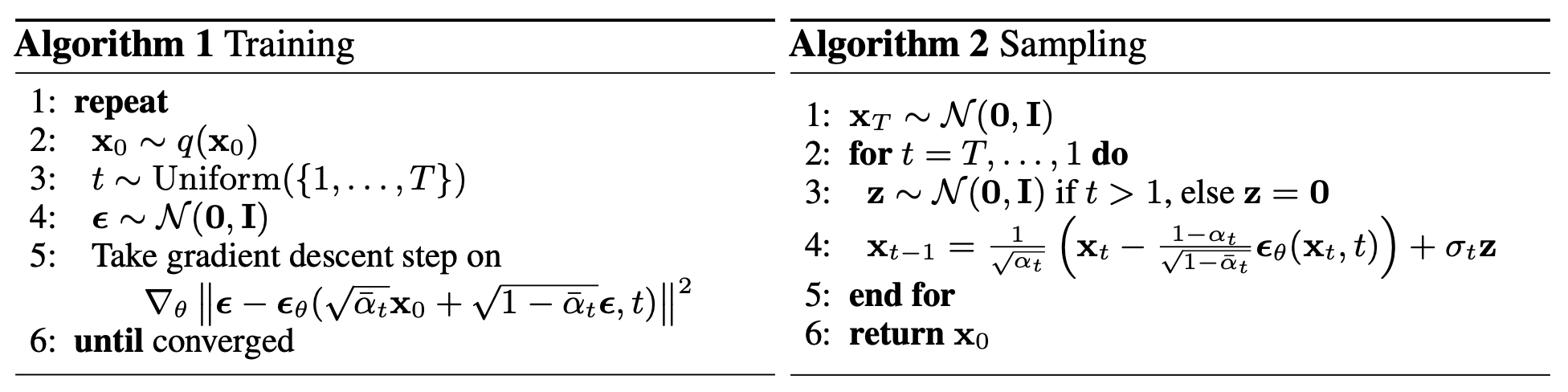
Pseudo code
![]()
Variational diffusion models are Markovian HVAEs with the following constraints:
The latent dimension is the same as the data dimension.
The encoder is fixed to linear Gaussian transitions \(q(\mathbf{x}_t | \mathbf{x}_{t-1})\).
The hyper-parameters are set such that \(q(\mathbf{x}_T | \mathbf{x}_0)\) is a standard Gaussian.
![]()
Credits: Kreis et al, 2022.
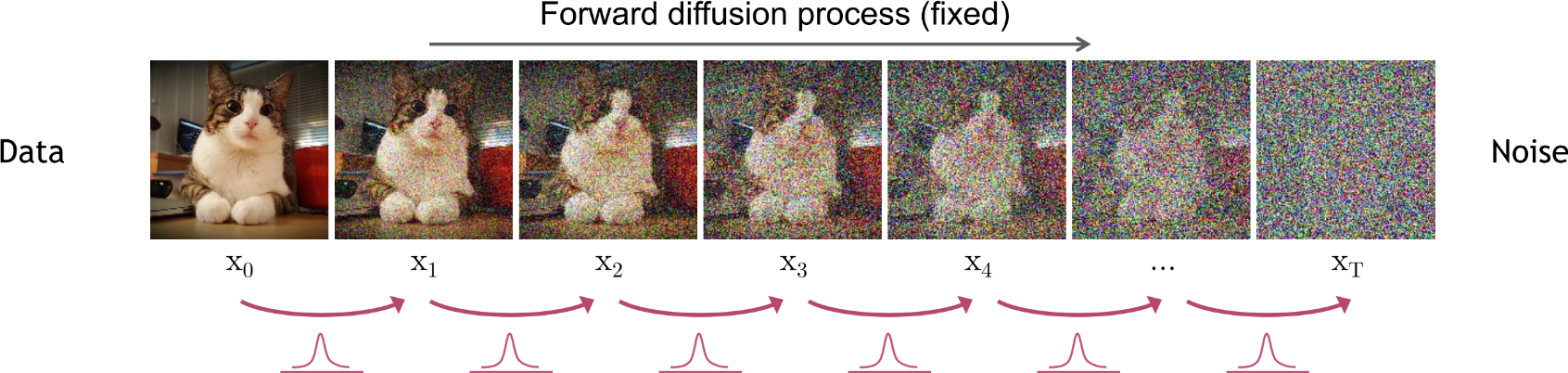
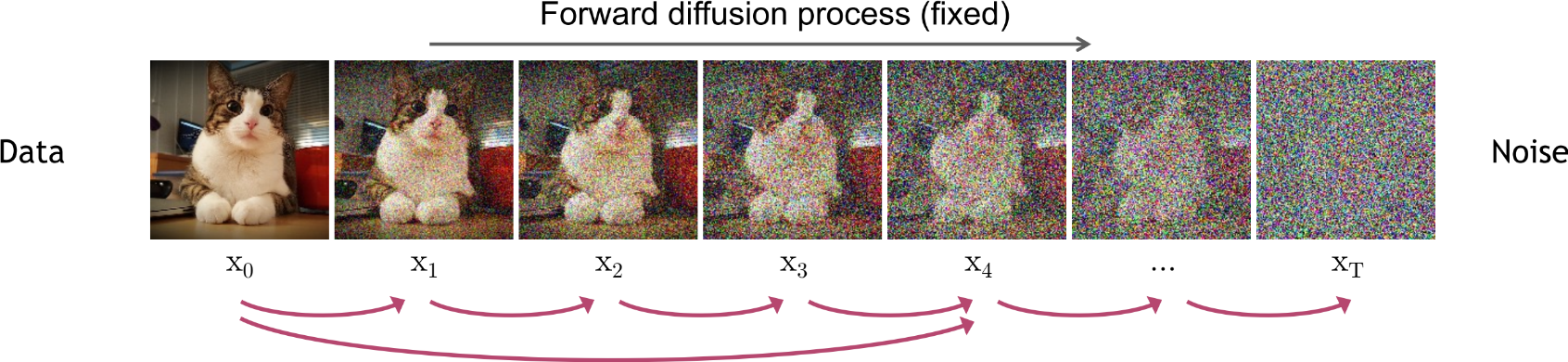
Forward diffusion process
![]()
Credits: Kreis et al, 2022.
With \(\epsilon \sim \mathcal{N}(\mathbf{0}, \mathbf{I})\), we have \[\begin{aligned}
\mathbf{x}_t &= \sqrt{ {\alpha}_t} \mathbf{x}_{t-1} + \sqrt{1-{\alpha}_t} \epsilon \\\\
q(\mathbf{x}_t | \mathbf{x}_{t-1}) &= \mathcal{N}(\mathbf{x}_t ; \sqrt{\alpha_t} \mathbf{x}_{t-1}, (1-\alpha_t)\mathbf{I}) \\\\
q(\mathbf{x}_{1:T} | \mathbf{x}_{0}) &= \prod_{t=1}^T q(\mathbf{x}_t | \mathbf{x}_{t-1})
\end{aligned}\]
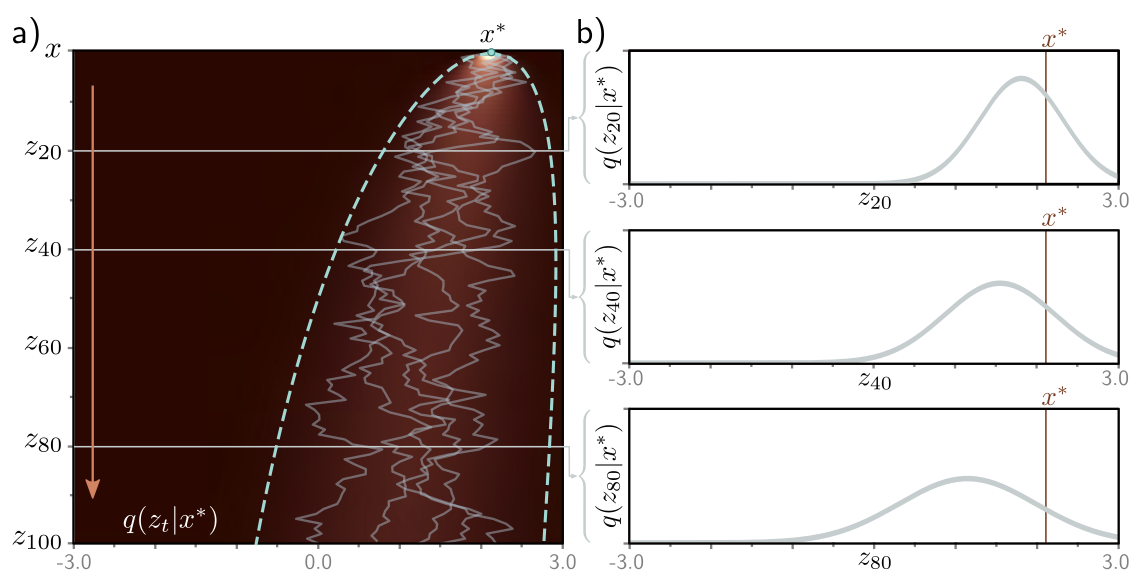
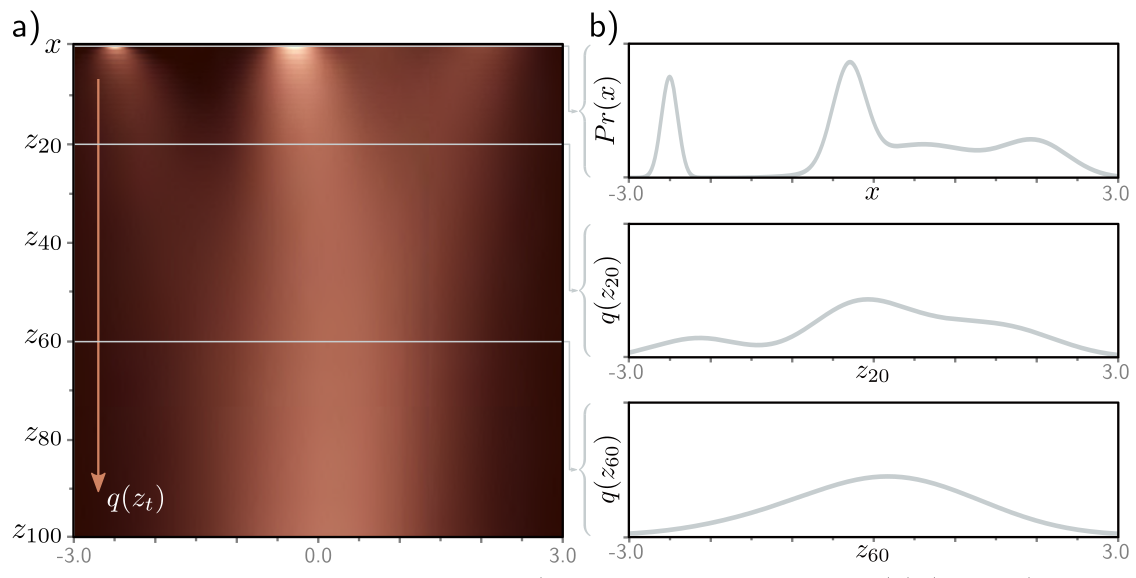
Diffusion kernel
With \(\bar{\alpha}_t = \prod_{i=1}^t \alpha_i\) and \(\epsilon \sim \mathcal{N}(\mathbf{0}, \mathbf{I})\), we have
\[\begin{aligned}
\mathbf{x}_t &= \sqrt{\bar{\alpha}_t} \mathbf{x}_{0} + \sqrt{1-\bar{\alpha}_t} \epsilon \\\\
q(\mathbf{x}_t | \mathbf{x}_{0}) &= \mathcal{N}(\mathbf{x}_t ; \sqrt{\bar{\alpha}_t} \mathbf{x}_{0}, (1-\bar{\alpha}_t)\mathbf{I})
\end{aligned}\]
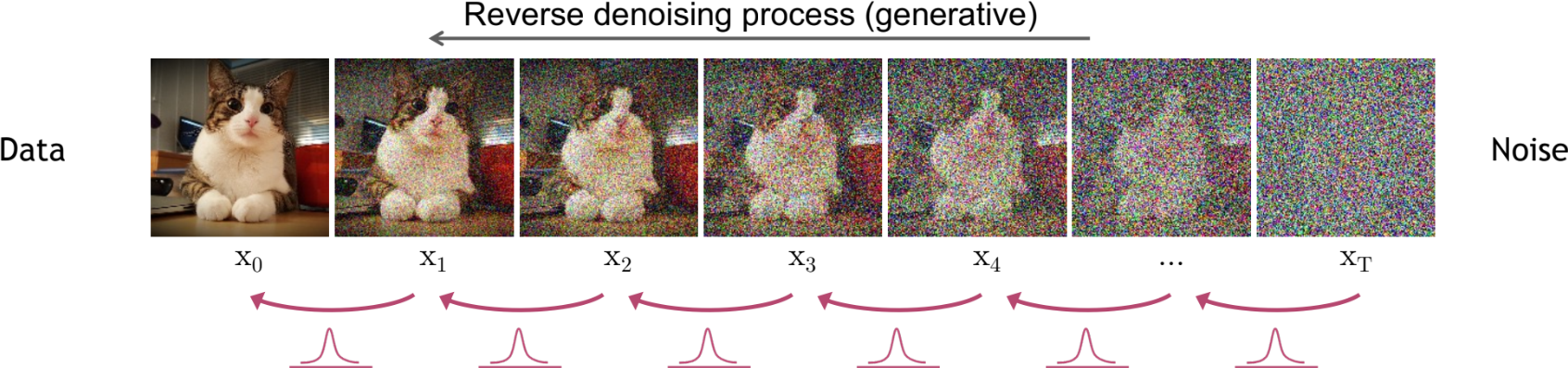
Reverse denoising process
\[\begin{aligned}
p(\mathbf{x}_{0:T}) &= p(\mathbf{x}_T) \prod_{t=1}^T p_\theta(\mathbf{x}_{t-1} | \mathbf{x}_t)\\\\
p(\mathbf{x}_T) &= \mathcal{N}(\mathbf{x}_T; \mathbf{0}, I) \\\\
p_\theta(\mathbf{x}_{t-1} | \mathbf{x}_t) &= \mathcal{N}(\mathbf{x}_{t-1}; \mu_\theta(\mathbf{x}_t, t), \sigma^2_\theta(\mathbf{x}_t, t)\mathbf{I}) \\\\
\mathbf{x}_{t-1} &= \mu_\theta(\mathbf{x}_t, t) + \sigma_\theta(\mathbf{x}_t, t) \mathbf{z} \quad\text{with}\quad \mathbf{z} \sim \mathcal{N}(\mathbf{0}, \mathbf{I})
\end{aligned}\]
Markovian Hierarchical VAEs
![]()
HVAES
Similarly to VAEs, training is done by maximizing the ELBO, using a variational distribution \(q_\phi(\mathbf{z}_{1:T} | \mathbf{x})\) over all levels of latent variables: \[\begin{aligned}
\log p_\theta(\mathbf{x}) &\geq \mathbb{E}_{q_\phi(\mathbf{z}_{1:T} | \mathbf{x})}\left[ \log \frac{p(\mathbf{x},\mathbf{z}_{1:T})}{q_\phi(\mathbf{z}_{1:T}|\mathbf{x})} \right]
\end{aligned}\]
Diffusion models are Markovian HVAEs with the following constraints:
The latent dimension is the same as the data dimension.
The encoder is fixed to linear Gaussian transitions \(q(\mathbf{x}_t | \mathbf{x}_{t-1})\).
The hyper-parameters are set such that \(q(\mathbf{x}_T | \mathbf{x}_0)\) is a standard Gaussian.
Training
For learning the parameters \(\theta\) of the reverse process, we can form a variational lower bound on the log-likelihood of the data as
\[\mathbb{E}_{q(\mathbf{x}_0)}\left[ \log p_\theta(\mathbf{x}_0) \right] \geq \mathbb{E}_{q(\mathbf{x}_0)q(\mathbf{x}_{1:T}|\mathbf{x}_0)}\left[ \log \frac{p_\theta(\mathbf{x}_{0:T})}{q(\mathbf{x}_{1:T} | \mathbf{x}_0)} \right] := L\]
This objective can be rewritten as \[\begin{aligned}
L &= \mathbb{E}_{q(\mathbf{x}_0)q(\mathbf{x}_{1:T}|\mathbf{x}_0)}\left[ \log \frac{p_\theta(\mathbf{x}_{0:T})}{q(\mathbf{x}_{1:T} | \mathbf{x}_0)} \right] \\\\
&= \mathbb{E}_{q(\mathbf{x}_0)} \left[L_0 - \sum_{t>1} L_{t-1} - L_T\right]
\end{aligned}\] where
\(L_0 = \mathbb{E}_{q(\mathbf{x}_1 | \mathbf{x}_0)}[\log p_\theta(\mathbf{x}_0 | \mathbf{x}_1)]\) can be interpreted as a reconstruction term. It can be approximated and optimized using a Monte Carlo estimate.
\(L_{t-1} = \mathbb{E}_{q(\mathbf{x}_t | \mathbf{x}_0)}\text{KL}(q(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0) || p_\theta(\mathbf{x}_{t-1} | \mathbf{x}_t) )\) is a denoising matching term. The transition \(q(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0)\) provides a learning signal for the reverse process, since it defines how to denoise the noisified input \(\mathbf{x}_t\) with access to the original input \(\mathbf{x}_0\).
\(L_T = \text{KL}(q(\mathbf{x}_T | \mathbf{x}_0) || p_\theta(\mathbf{x}_T))\) represents how close the distribution of the final noisified input is to the standard Gaussian. It has no trainable parameters.
(Some calculations later…)
\[\begin{aligned}
&\arg \min_\theta L_{t-1} \\\\
=&\arg \min_\theta \mathbb{E}_{q(\mathbf{x}_t | \mathbf{x}_0)} \frac{1}{2\sigma^2_t} \frac{\bar{\alpha}_{t-1}(1-\alpha_t)^2}{(1-\bar{\alpha}_t)^2} || \hat{\mathbf{x}}_\theta(\mathbf{x}_t, t) - \mathbf{x}_0 ||_2^2
\end{aligned}\]
Interpretation 1: Denoising. Training a diffusion model amounts to learning a neural network that predicts the original ground truth \(\mathbf{x}_0\) from a noisy input \(\mathbf{x}_t\).
Minimizing the summation of the \(L_{t-1}\) terms across all noise levels \(t\) can be approximated by minimizing the expectation over all timesteps as \[\arg \min_\theta \mathbb{E}_{t \sim U\\{2,T\\}} \mathbb{E}_{q(\mathbf{x}_t | \mathbf{x}_0)}\text{KL}(q(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0) || p_\theta(\mathbf{x}_{t-1} | \mathbf{x}_t) ).\]
\[\begin{aligned}
&\arg \min_\theta L_{t-1} \\\\
=&\arg \min_\theta \mathbb{E}_{\mathcal{N}(\epsilon;\mathbf{0}, I)} \frac{1}{2\sigma^2_t} \frac{(1-\alpha_t)^2}{(1-\bar{\alpha}_t) \alpha_t} || {\epsilon}_\theta(\underbrace{\sqrt{\bar{\alpha}_t} \mathbf{x}_{0} + \sqrt{1-\bar{\alpha}_t} \epsilon}_{\mathbf{x}_t}, t) - \epsilon ||_2^2 \\\\
\approx& \arg \min_\theta \mathbb{E}_{\mathcal{N}(\epsilon;\mathbf{0}, I)} || {\epsilon}_\theta(\underbrace{\sqrt{\bar{\alpha}_t} \mathbf{x}_{0} + \sqrt{1-\bar{\alpha}_t} \epsilon}_{\mathbf{x}_t}, t) - \epsilon ||_2^2
\end{aligned}\]
Interpretation 2: Noise prediction. Training a diffusion model amounts to learning a neural network that predicts the noise \(\epsilon\) that was added to the original ground truth \(\mathbf{x}_0\) to obtain the noisy \(\mathbf{x}_t\).
\[\begin{aligned}
&\arg \min_\theta L_{t-1} \\\\
=&\arg \min_\theta \mathbb{E}_{q(\mathbf{x}_t | \mathbf{x}_0)} \frac{1}{2\sigma^2_t} \frac{(1-\alpha_t)^2}{\alpha_t} || s_\theta(\mathbf{x}_t, t) - \nabla_{\mathbf{x}_t} \log q(\mathbf{x}_t | \mathbf{x}_0) ||_2^2
\end{aligned}\]
Interpretation 3: Denoising score matching. Training a diffusion model amounts to learning a neural network that predicts the score \(\nabla_{\mathbf{x}_t} \log q(\mathbf{x}_t | \mathbf{x}_0)\) of the tractable posterior.
The distribution \(q(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0)\) is the tractable posterior distribution \[
q(\mathbf{x}_{t-1}|\mathbf{x}_t, \mathbf{x}_0) = \frac{q(\mathbf{x}_t | \mathbf{x}_{t-1}, \mathbf{x}_0) q(\mathbf{x}_{t-1} | \mathbf{x}_0)}{q(\mathbf{x}_t | \mathbf{x}_0)} = \mathcal{N}(\mathbf{x}_{t-1}; \mu_q(\mathbf{x}_t, \mathbf{x}_0, t), \sigma^2_t I)
\] where \[
\begin{aligned}\mu_q(\mathbf{x}_t, \mathbf{x}_0, t) &= \frac{\sqrt{\alpha_t}(1-\bar{\alpha}_{t-1})}{1-\bar{\alpha}_t}\mathbf{x}_t + \frac{\sqrt{\bar{\alpha}_{t-1}}(1-\alpha_t)}{1-\bar{\alpha}_t}\mathbf{x}_0 \qquad\text{and} \qquad
\sigma^2_t = \frac{(1-\alpha_t)(1-\bar{\alpha}_{t-1})}{1-\bar{\alpha}_t}\\
&= \frac{1}{\sqrt{\alpha}_t} \mathbf{x}_t + \frac{1-\alpha_t}{\sqrt{\alpha_t}} \nabla_{\mathbf{x}_t} \log q(\mathbf{x}_t | \mathbf{x}_0).
\end{aligned}
\]
The score function \(\nabla_{\mathbf{x}_0} \log q(\mathbf{x}_0)\) is a vector field that points in the direction of the highest density of the data distribution \(q(\mathbf{x}_0)\).
It can be used to find modes of the data distribution or to generate samples by Langevin dynamics.
Since \(s_\theta(\mathbf{x}_t, t)\) is learned in expectation over the data distribution \(q(\mathbf{x}_0)\), the score network will eventually approximate the score of the marginal distribution \(q(\mathbf{x}_t\)), for each noise level \(t\), that is \[s_\theta(\mathbf{x}_t, t) \approx \nabla_{\mathbf{x}_t} \log q(\mathbf{x}_t).\]
Network architectures
Diffusion models often use U-Net architectures with ResNet blocks and self-attention layers to represent \(\hat{\mathbf{x}}_\theta(\mathbf{x}_t, t)\), \(\epsilon_\theta(\mathbf{x}_t, t)\) or \(s_\theta(\mathbf{x}_t, t)\).
![]()
Credits: Kreis et al, 2022.
Continuous-time diffusion models
![]()
Credits: Kreis et al, 2022.
With \(\beta_t = 1 - \alpha_t\), we can rewrite the forward process as \[\begin{aligned}
\mathbf{x}_t &= \sqrt{ {\alpha}_t} \mathbf{x}_{t-1} + \sqrt{1-{\alpha}_t} \mathcal{N}(\mathbf{0}, \mathbf{I}) \\\\
&= \sqrt{1 - {\beta}_t} \mathbf{x}_{t-1} + \sqrt{ {\beta}_t} \mathcal{N}(\mathbf{0}, \mathbf{I}) \\\\
&= \sqrt{1 - {\beta}(t)\Delta_t} \mathbf{x}_{t-1} + \sqrt{ {\beta}(t)\Delta_t} \mathcal{N}(\mathbf{0}, \mathbf{I})
\end{aligned}\]
When \(\Delta_t \rightarrow 0\), we can further rewrite the forward process as \[
\mathbf{x}_t = \sqrt{1 - {\beta}(t)\Delta_t} \mathbf{x}_{t-1} + \sqrt{ {\beta}(t)\Delta_t} \mathcal{N}(\mathbf{0}, \mathbf{I})\approx \mathbf{x}_{t-1} - \frac{\beta(t)\Delta_t}{2} \mathbf{x}_{t-1} + \sqrt{ {\beta}(t)\Delta_t} \mathcal{N}(\mathbf{0}, \mathbf{I})
.\]
This last update rule corresponds to the Euler-Maruyama discretization of the stochastic differential equation (SDE) \[\text{d}\mathbf{x}_t = -\frac{1}{2}\beta(t)\mathbf{x}_t \text{d}t + \sqrt{\beta(t)} \text{d}\mathbf{w}_t\] describing the diffusion in the infinitesimal limit.
The reverse process satisfies a reverse-time SDE that can be derived analytically from the forward-time SDE and the score of the marginal distribution \(q(\mathbf{x}_t)\), as \[\text{d}\mathbf{x}_t = \left[ -\frac{1}{2}\beta(t)\mathbf{x}_t - \beta(t)\nabla_{\mathbf{x}_t} \log q(\mathbf{x}_t) \right] \text{d}t + \sqrt{\beta(t)} \text{d}\mathbf{w}_t.\]
Continuous-time normalizing flows
Replace the discrete sequence of transformations with a neural ODE with reversible dynamics such that \[\begin{aligned}
&\mathbf{z}_0 \sim p(\mathbf{z})\\\\
&\frac{d\mathbf{z}(t)}{dt} = f(\mathbf{z}(t), t, \theta)\\\\
&\mathbf{x} = \mathbf{z}(1) = \mathbf{z}_0 + \int_0^1 f(\mathbf{z}(t), t) dt.
\end{aligned}\]
The instantaneous change of variable yields \[\log p(\mathbf{x}) = \log p(\mathbf{z}(0)) - \int_0^1 \text{Tr} \left( \frac{\partial f(\mathbf{z}(t), t, \theta)}{\partial \mathbf{z}(t)} \right) dt.\]
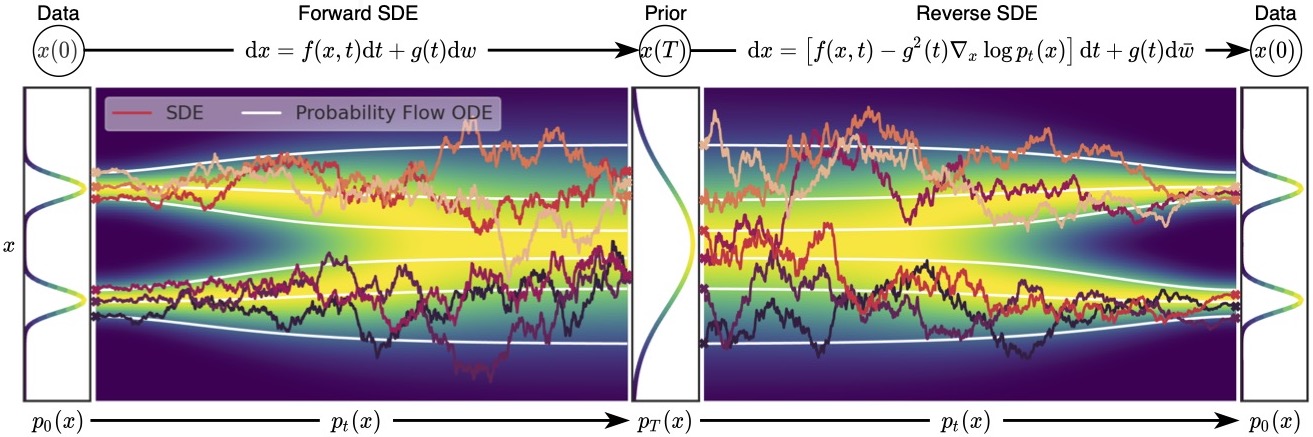
Probability flow ODE
Back to diffusion: For any diffusion process, there exists a corresponding deterministic process \[\text{d}\mathbf{x}_t = \left[ \mathbf{f}(t, \mathbf{x}_t) - \frac{1}{2} g^2(t) \nabla_{\mathbf{x}_t} \log p(\mathbf{x}_t) \right] \text{d}t\] whose trajectories share the same marginal densities \(p(\mathbf{x}_t)\).
Therefore, when \(\nabla_{\mathbf{x}_t} \log p(\mathbf{x}_t)\) is replaced by its approximation \(s_\theta(\mathbf{x}_t, t)\), the probability flow ODE becomes a special case of a neural ODE. In particular, it is an example of continuous-time normalizing flows!
![]()
Credits: Song, 2021.